
")
")
")
")






این برد کنترلر با طراحی صنعتی و بهرهگیری از 6 کلید مکانیکی اصلی و 2 شستی مستقل، امکان مدیریت همزمان چند موتور DC را فراهم میسازد. سه موتور اصلی از طریق کلیدهای MR و ML در دو جهت راستگرد و چپگرد کنترل میشوند و دو موتور جانبی نیز با شستیهای B1 و B2 بهصورت تکجهته فعال میشوند. ارتباط میان برد کنترلر و برد موتور از طریق کابل فلت IDC انجام میشود و همین ساختار، نصب و راهاندازی مجموعه را سادهتر و منظمتر میکند. امکان تأمین تغذیه از طریق برد کنترلر یا برد موتور، انعطافپذیری بیشتری برای سازگاری با نیازهای مختلف پروژه ایجاد میکند. این محصول برای کاربردهایی که نیاز به کنترل دقیق، سریع و مستقل چند موتور دارند، گزینهای مناسب و قابل اعتماد به شمار میآید.
خرید تکی این محصول تنها از طریق فروشگاه ECA امکانپذیر است.
برای ثبت سفارش عمده، دریافت قیمت همکاری و هماهنگی تولید، لطفاً از طریق پیامرسان بله با شماره 09354313451 تماس حاصل فرمایید.
محصولات ایرانیک قابلیت سفارشیسازی کامل دارند؛ از تغییرات سختافزاری تا تولید انبوه با لوگو و نشان تجاری اختصاصی شما.
مشخصات
- ولتاژ کاری: مطابق ولتاژ موتورها
- ابعاد برد کنترلر: 100 در 70 میلیمتر
- ابعاد برد موتور: 33 در 33 میلیمتر
- تعداد کلیدها: 6 کلید مکانیکی + 2 شستی
- تعداد موتورها: 3 موتور اصلی + 2 موتور جانبی
- نوع کانکتور موتورها: 2 پین نری 2510
- نوع کابل: کابل IDC فلت
- طول کابل: 800 میلیمتر
- نوع اتصال: سوکت IDC و کانکتور 2 پین
- تامین تغذیه: از طریق جک برد کنترلر یا کانکتور برد موتور
- محافظت: نیاز به نصب روی سطح نارسانا
با طراحی مناسب و استفاده از این کلیدها، میتوانید ربات خود را در جهات مختلف به حرکت درآورید. عملکرد کلی کلید ها به صورت زیر می باشد:
کلید های راست گرد(MR):
کلیدهای (1, 2, 3) MR برای راستگرد کردن موتورها طراحی شدهاند. با فشار دادن این کلیدها، هر یک از موتورها به صورت راستگرد شروع به چرخش میکنند.
کلید های چپگرد(ML):
کلیدهای (1, 2, 3) ML برای چپگرد کردن موتورها طراحی شدهاند. با فشار دادن این کلیدها، هر یک از موتورها به صورت چپگرد شروع به چرخش میکنند.
کلید های B1,B2:
این کلید ها که هر کدام برای دو موتور B1,B2 هستند با فشردن هر کلید، موتور مختص خود شروع به چرخش می کند.
برای راهاندازی دسته کنترلر، دو روش برای تامین تغذیه و ارتباط بین دو برد وجود دارد که با توجه به ساختار پروژه و نیازهای مخصوص آن، می توانید انتخاب کنید:
1. تامین تغذیه در برد موتور:
تغذیه به دسته کنترلر از طریق کانکتور 2 پین نری نوع 2510 در برد موتور ارائه میشود، که به منبع تغذیه متصل میشود.
2. تامین تغذیه برد کنترلر:
تغذیه به دسته کنترلر از طریق جک استاندارد مادگی در برد کنترلر ارائه میشود، که به منبع تغذیه خارجی متصل میشود.
هر کدام از روش هارا که انتخاب کنید، با استفاده از کابل IDC تغذیه برای هر دو برد فراهم شود و ارتباط بین آنها برقرار شود .
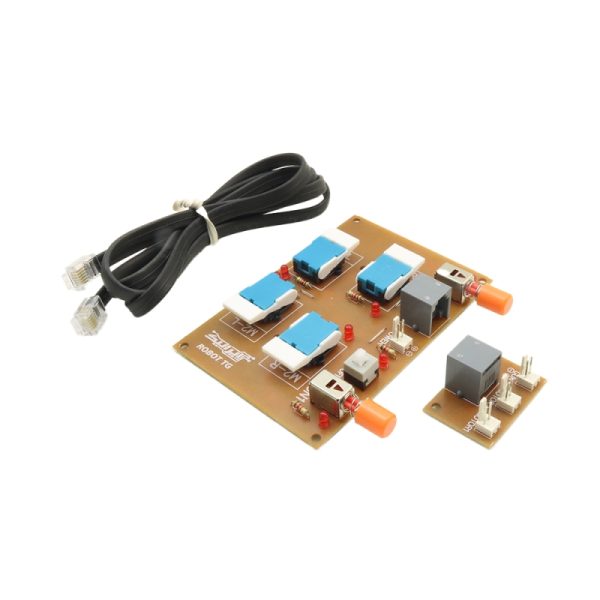
اجزای تشکیل دهنده
1. برد موتور:
با ابعاد 3.3 × 3.3 سانتیمتر که شامل شش کانکتور 2 پین نری 2510 برای اتصال موتورها می باشد.
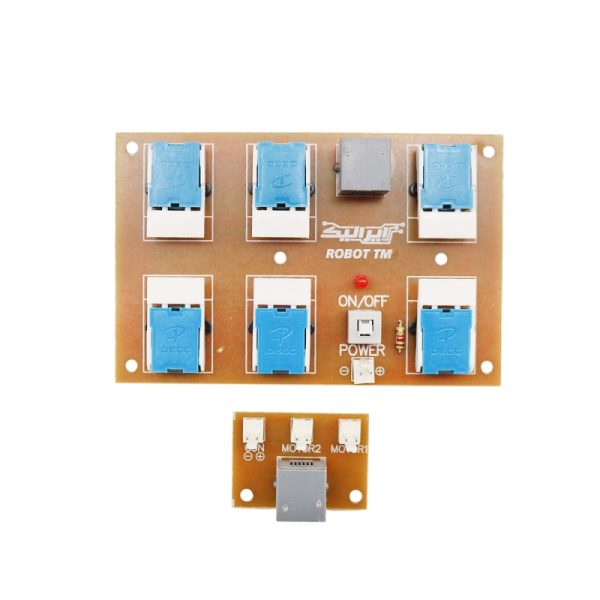
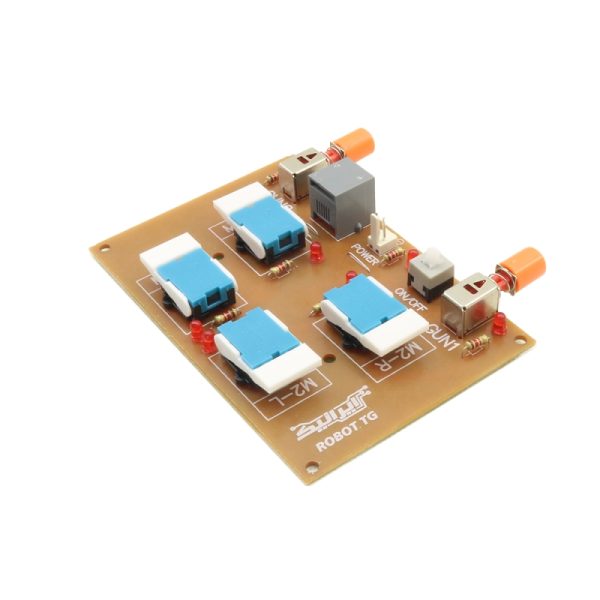
2. برد کنترلر:
با ابعاد 10×7 سانتیمتر که شامل هشت کلید برای کنترل جهت چرخش موتورها (جلو و عقب) می باشد.
3. سیم رابط فلت IDC به طول 80 سانتی متر جهت کنترل موتور ها از طریق برد کنترلر
نکات ایمنی
علاوه بر نکلات ایمنی کلی که هنگام استفاده از هر وسیله ی الکتریکی که باید رعایت کرد، رعایت نکات زیر هنگام استفاده از این دسته کنترلر توصیه می شود:
- اطمینان حاصل کنید که ولتاژ تغذیه متناسب با ولتاژ کاری موتورها انتخاب شود تا از آسیب دیدن موتورها جلوگیری گردد.
- برد کنترلر و برد موتور به دلیل نداشتن عایق الکتریکی، نباید به طور مستقیم روی سطوح رسانا (مانند بدنه فلزی رباتها) قرار گیرند؛ به همین جهت از عایق الکتریکی مناسب، زیر بردها استفاده کنید تا از اتصال کوتاه و آسیب به قطعات جلوگیری شود.
کاربردهای رایج
این دسته کنترلر برای پروژههایی مناسب است که در آنها کنترل چند موتور بهصورت همزمان و مستقل اهمیت دارد. استفاده از آن در ساخت رباتهای رقابتی و آموزشی باعث میشود فرایند هدایت و آزمایش موتورها با دقت و سرعت بیشتری انجام شود.
- کنترل ربات جنگجو
- کنترل ربات فوتبالیست پیشرفته
- کنترل ربات آتشنشان
- کنترل ربات چند موتوره
- پروژههای دستساز حرفهای
- کیتهای آموزشی حرکتی
- آزمایش کنترل مستقل موتورها
- ساخت کنترلر چند کاناله
- تمرین ساخت مدارهای کنترلی
- توسعه کیتهای مسابقهای




نقد و بررسیها
هنوز بررسیای ثبت نشده است.