
")
")
")
")



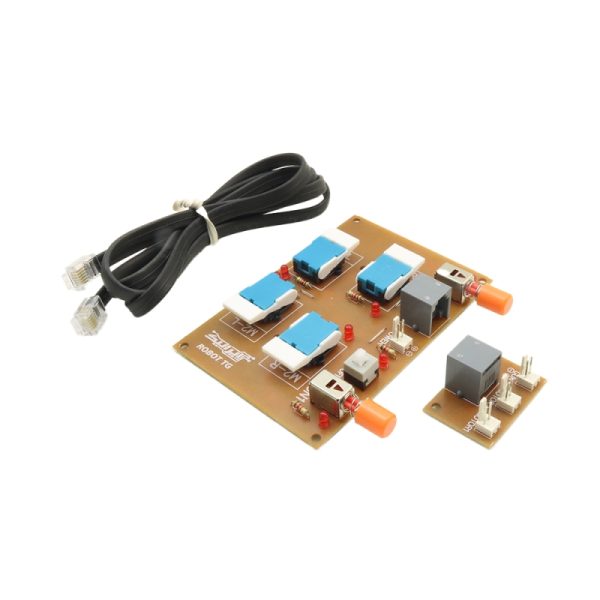
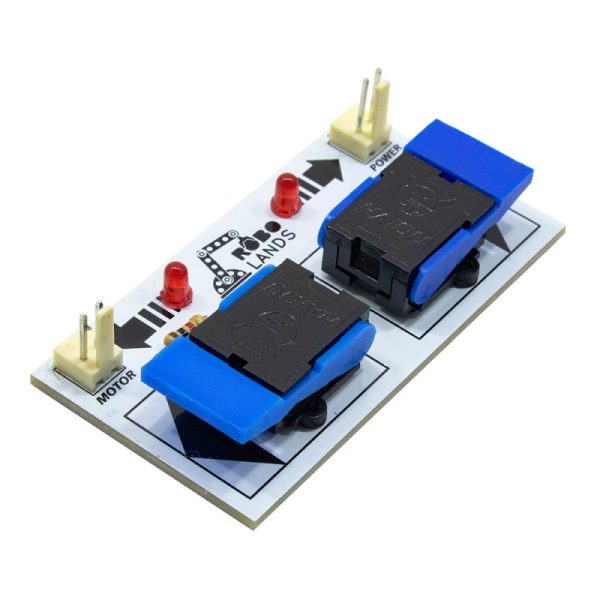
این دسته کنترلر برای مدیریت همزمان 2 موتور ربات طراحی شده و از یک برد کنترلر، یک برد موتور و کابل 6 سیمه صنعتی به طول 1500 میلیمتر تشکیل میشود. روی برد کنترلر 4 کلید مکانیکی قرار دارد که با ترکیب آنها میتوان حرکت رو به جلو، عقب و چرخش تانکی را برای رباتهای متحرک اجرا کرد. دو کلید بالایی برای حرکت جلو و دو کلید پایینی برای حرکت عقب به کار میروند و با فشردن هر کلید به صورت جداگانه، چرخش چپ و راست نیز امکانپذیر است. برد موتور دارای کانکتورهای 2 پین نری 2510 برای اتصال موتور و تغذیه است و ارتباط بین دو برد از طریق سوکت مخابراتی RJ برقرار میشود. تغذیه مجموعه از طریق کانکتور GUN روی برد موتور انجام میگیرد. نصب قطعات روی سطح غیر رسانا ضروری است تا از اتصال کوتاه جلوگیری شود. این محصول برای پروژههای رباتیک آموزشی و ساخت رباتهای کوچک با نیاز به کنترل مستقیم دو موتور بسیار کاربردی است.
خرید تکی این محصول تنها از طریق فروشگاه ECA امکانپذیر است.
برای ثبت سفارش عمده، دریافت قیمت همکاری و هماهنگی تولید، لطفاً از طریق پیامرسان بله با شماره 09354313451 تماس حاصل فرمایید.
محصولات ایرانیک قابلیت سفارشیسازی کامل دارند؛ از تغییرات سختافزاری تا تولید انبوه با لوگو و نشان تجاری اختصاصی شما.
مشخصات
- ولتاژ کاری: مطابق ولتاژ کاری موتورها
- ابعاد برد کنترلر: 100 در 65 میلیمتر
- ابعاد برد موتور: 35 در 25 میلیمتر
- تعداد کلیدها: 4 کلید مکانیکی
- نوع اتصال موتور: کانکتور 2 پین نری 2510
- نوع کابل: کابل مخابراتی 6 سیمه صنعتی
- طول کابل: 1500 میلیمتر
- سوکت ارتباطی: سوکت مخابراتی RJ
- محافظت: نیاز به نصب روی سطح غیر رسانا
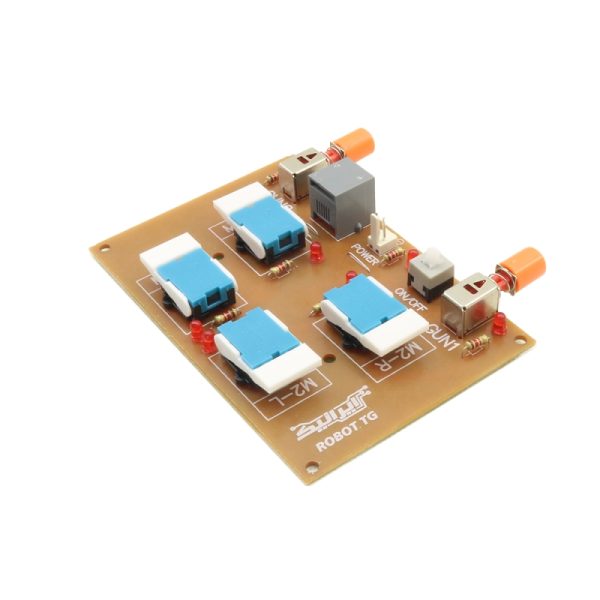
با طراحی مناسب و استفاده از این کلیدها، میتوانید ربات خود را در جهات مختلف به حرکت درآورید. عملکرد کلی کلید ها به صورت زیر می باشد:
کلید های راست گرد(MR):
کلیدهای (1, 2) MR برای راستگرد کردن موتورها طراحی شدهاند. با فشار دادن این کلیدها، هر یک از موتورها به صورت راستگرد شروع به چرخش میکنند.
کلید های چپگرد(ML):
کلیدهای (1, 2) ML برای چپگرد کردن موتورها طراحی شدهاند. با فشار دادن این کلیدها، هر یک از موتورها به صورت چپگرد شروع به چرخش میکنند.
جهت راه اندازی دسته کنترلر کافی است، کابل تغذیه را به برد کانکتور 2 پین نری 2510 به نام GUN که در روی برد موتور قرار دارد متصل کنید.
اجزای تشکیل دهنده
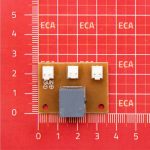
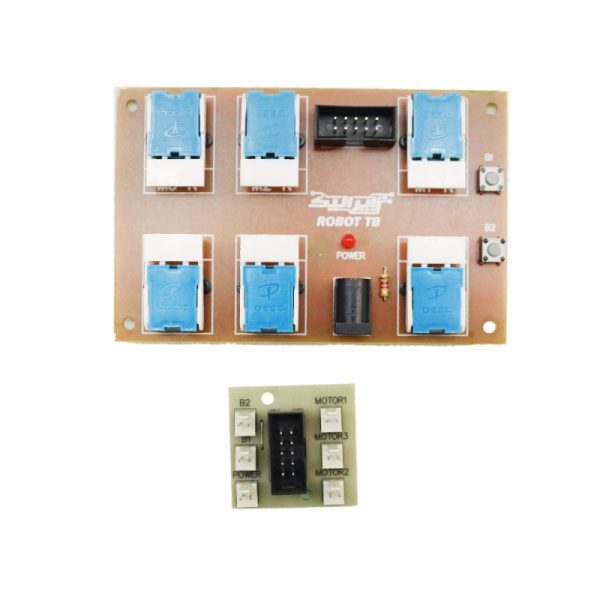
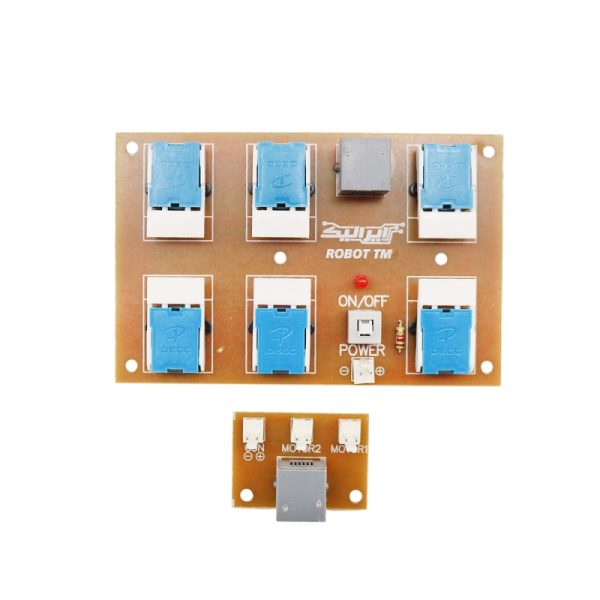
1. برد موتور:
با ابعاد 2.5×3.5 سانتیمتر که شامل سه کانکتور 2 پین نری 2510 برای اتصال موتورها و تغذیه جهت تامین برق و یک سوکت مخابراتی برای برقراری ارتباط با برد کنترلر می باشد.
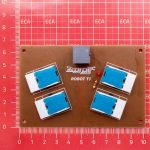
2. برد کنترلر:
با ابعاد 10×6.5 سانتیمتر که شامل چهار کلید برای کنترل جهت چرخش موتورها (جلو و عقب) و یک سوکت مخابراتی برای برقراری ارتباط با برد موتور می باشد.
3. کابل 6 سیمه مخابراتی باکیفیت و صنعتی به طول 1.5 متر جهت کنترل موتور ها از طریق برد کنترلر
نکات ایمنی
علاوه بر نکلات ایمنی کلی که هنگام استفاده از هر وسیله ی الکتریکی که باید رعایت کرد، رعایت نکات زیر هنگام استفاده از این دسته کنترلر توصیه می شود:
- اطمینان حاصل کنید که ولتاژ تغذیه متناسب با ولتاژ کاری موتورها انتخاب شود تا از آسیب دیدن موتورها جلوگیری گردد.
- برد کنترلر و برد موتور به دلیل نداشتن عایق الکتریکی، نباید به طور مستقیم روی سطوح رسانا (مانند بدنه فلزی رباتها) قرار گیرند؛ به همین جهت از عایق الکتریکی مناسب، زیر بردها استفاده کنید تا از اتصال کوتاه و آسیب به قطعات جلوگیری شود.
کاربردهای رایج
این کنترلر برای رباتهای متحرک کوچک که نیاز به هدایت دستی و دقیق دو موتور دارند، انتخابی مناسب است و در پروژههای آموزشی، کیتهای دانشآموزی و نمونههای آزمایشگاهی رباتیک استفاده میشود.
- کنترل ربات فوتبالیست
- کنترل ربات جنگجو
- کنترل ربات آتشنشان
- پروژههای آموزشی رباتیک
- ساخت کیتهای کنترلی دانشآموزی
- راهاندازی شاسی ربات دو موتور
- توسعه کیتهای دستساز حرکتی
- آزمایش کنترل موتورها در کلاس
- آموزش مفاهیم مکانیک حرکتی
- تمرین ساخت کنترلر ساده





نقد و بررسیها
هنوز بررسیای ثبت نشده است.