
")
")
")
")







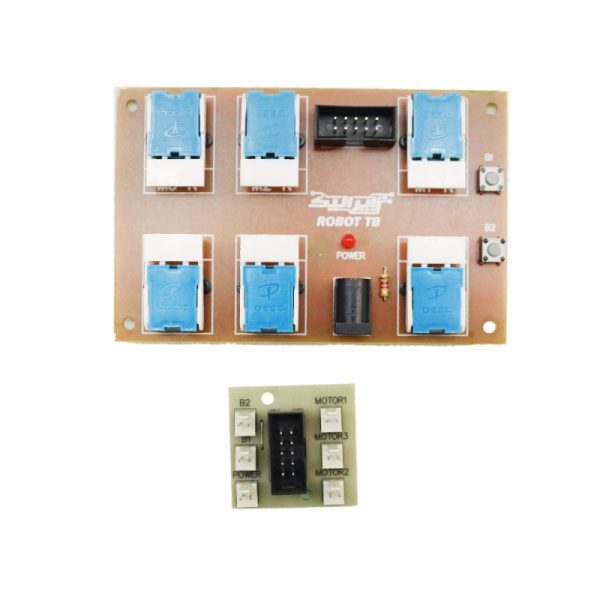
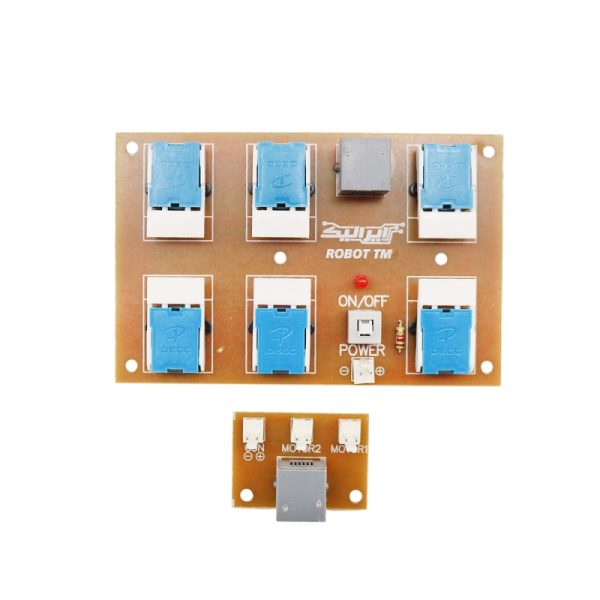
این برد کنترلر با 6 کلید مکانیکی، امکان مدیریت همزمان 3 موتور را برای پروژههای رباتیک پیشرفته فراهم میسازد. دو موتور حرکتی اصلی توسط کلیدهای MR و ML در جهتهای راستگرد و چپگرد کنترل میشوند و موتور سوم که به عنوان موتور شوتر GUN شناخته میشود، با کلیدهای مخصوص خود در دو جهت فعال میگردد. با استفاده از ترکیب کلیدها میتوان حرکت ربات را به صورت جلو، عقب، راست، چپ و حتی چرخش تانکی کنترل کرد. ارتباط میان برد کنترلر و برد موتور از طریق کابل 6 سیمه صنعتی برقرار میشود و تغذیه نیز از طریق کانکتور 2 پین نری 2510 روی برد کنترلر تأمین میگردد. این ساختار، کنترل دقیق و پایدار را برای رباتهای رقابتی و آموزشی فراهم میکند. نصب روی سطح نارسانا برای جلوگیری از اتصال کوتاه ضروری است.
مشخصات
- ولتاژ کاری: متناسب با ولتاژ کاری موتورها
- ابعاد برد کنترلر: 100 در 70 میلیمتر
- ابعاد برد موتور: 35 در 25 میلیمتر
- تعداد کلیدها: 6 کلید مکانیکی
- تعداد موتورها: 3 موتور
- نوع کانکتور موتورها: 2 پین نری 2510
- نوع کابل: کابل 6 سیمه صنعتی
- طول کابل: 1500 میلیمتر
- نوع اتصال: سوکت مخابراتی RJ
- محافظت: نیاز به نصب روی سطح نارسانا
با طراحی مناسب و استفاده از این کلیدها، میتوانید ربات خود را در جهات مختلف به حرکت درآورید. عملکرد کلی کلید ها به صورت زیر می باشد:
کلید های راست گرد(MR):
کلیدهای (1,2)MR برای راستگرد کردن موتورها طراحی شدهاند. با فشار دادن این کلیدها، هر یک از موتورها به صورت راستگرد شروع به چرخش میکنند.
کلید های چپگرد(ML):
کلیدهای (1,2) ML برای چپگرد کردن موتورها طراحی شدهاند. با فشار دادن این کلیدها، هر یک از موتورها به صورت چپگرد شروع به چرخش میکنند.
کلید های (1,2)GUN:
برای کنترل موتور های GUN در دو جهت کاربرد دارد.
برای مثال، با فشار کلیدهای R، ربات به جلو و با فشار کلیدهای L به عقب حرکت میکند. فشردن کلیدهای راست یا چپ به تنهایی باعث چرخش ربات مثل تانک میشود و با کلیدهای شوتر، موتور GUN فعال می شود. این موتور جهت انجام عملیاتی مثل ضربه زدن و شوت کردن استفاده میشود.
تغذیه ی دسته کنترلر از طریق کانکتور 2 پین نری 2510 که در روی برد کنترلر قرار دارد تامین می شود.
اجزای تشکیل دهنده
1. برد موتور:
با ابعاد 2.5 × 3.5 سانتیمتر که شامل سه کانکتور 2 پین نری 2510 برای اتصال موتورها و یک سوکت مخابراتی برای برقراری ارتباط با برد کنترلر می باشد.
2. برد کنترلر6 کلیده:
با ابعاد 10×7 سانتیمتر که شامل شش کلید برای کنترل جهت چرخش موتورها (جلو و عقب) و یک کانکتور 2 پین نری 2510 برای تامین برق می باشد.
3. کابل 6 سیمه مخابراتی صنعتی و با کیفیت به طول 1.5 متر جهت کنترل موتور ها از طریق برد کنترلر
نکات ایمنی
علاوه بر نکلات ایمنی کلی که هنگام استفاده از هر وسیله ی الکتریکی که باید رعایت کرد، رعایت نکات زیر هنگام استفاده از این دسته کنترلر توصیه می شود:
- اطمینان حاصل کنید که ولتاژ تغذیه متناسب با ولتاژ کاری موتورها انتخاب شود تا از آسیب دیدن موتورها جلوگیری گردد.
- برد کنترلر و برد موتور به دلیل نداشتن عایق الکتریکی، نباید به طور مستقیم روی سطوح رسانا (مانند بدنه فلزی رباتها) قرار گیرند؛ به همین جهت از عایق الکتریکی مناسب، زیر بردها استفاده کنید تا از اتصال کوتاه و آسیب به قطعات جلوگیری شود.
کاربردهای رایج
این دسته کنترلر برای ساخت و کنترل رباتهای رزمی و پروژههایی که به کنترل چند موتور و موتور شوتر نیاز دارند، بسیار مناسب است. همچنین در کیتهای آموزشی و پروژههای دستساز حرکتی کاربرد گستردهای دارد.
- کنترل ربات جنگجو
- کنترل ربات فوتبالیست
- کنترل ربات آتشنشان
- راهاندازی موتور شوتر
- آموزش مفاهیم رباتیک پیشرفته
- پروژههای دستساز کنترلی
- کیتهای آموزشی حرکتی
- کنترل شاسی ربات سه موتور
- آزمایش کنترل جهت موتور
- تمرین ساخت دسته کنترل پیشرفته




نقد و بررسیها
هنوز بررسیای ثبت نشده است.